

The NEAR-Lab acoustic measurement facility is located in suite 60-24 at 1900 SW 4th Ave, Portland OR 97201. The facility contains equipment for:
Underwater acoustics is the study sound propagation in water and its interactions with boundaries (surface and bottom). Unlike electromagnetic waves, acoustic waves can propagate in water for long ranges on the order of kilometers, and this allows for a large variety of applications such as remote sensing of the seabed, detection of ships or targets of interest in the water column, and the study marine mammal behavior, to mention a few.
The NEAR-Lab acoustics measurement facility offers the capability to conduct experiments for studying waveguide propagation and scattering from rough surfaces and random media. The experiments have scaled down physical dimensions from those of typical field experiments and are performed at ultrasound frequencies, instead of the usual low frequencies used in the field.
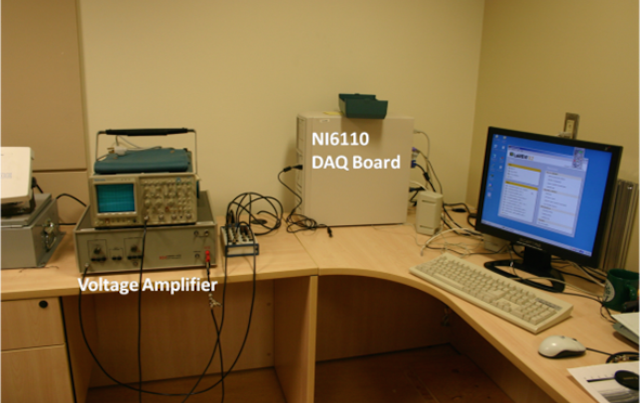
Our facility is equipped with:
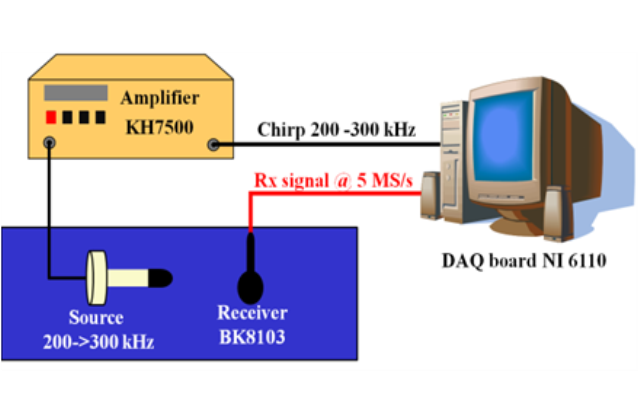
• A DAQ board capable of recording four simultaneous channels at 5 MS/s.
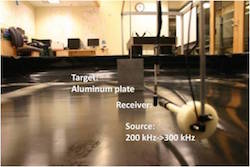
Validation experiments of algorithms for target tracking and demonstrations for academic purposes can be performed in our facility using scaled down scatterers such as steel ball bearings, brass cylinders and aluminum plates. Similarly, wave propagation in random media can be studied using slabs of elastic background material with well characterized embedded scatterers, such as glass or metal beads.

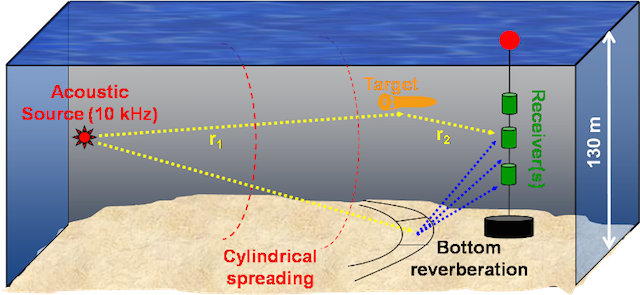
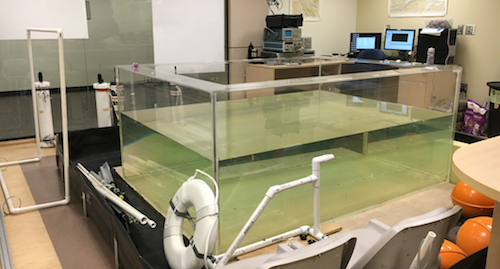
Experiments in shallow water (depth 130 m) performed at frequencies around 10 kHz (wavelength ~ 0.15 m) can be scaled down and reproduced in our 10x10x1 feet water tank, using higher frequencies around 250 kHz and higher (wavelength ~ 6 mm). In both cases, the dimension of most of the relevant features (targets, water depth, etc) relative to the wavelength is preserved.

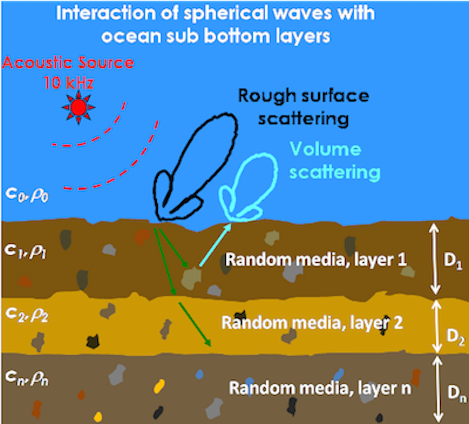
Propagation of spherical waves and scattering from rough surfaces and random media are performed in our 5x7x3 feet acrylic tank. The experimental set-up can also be used for instrument calibration, study of scattering from simple geometries like spheres, cylinders or more complex scatterers such as fish or rocks.

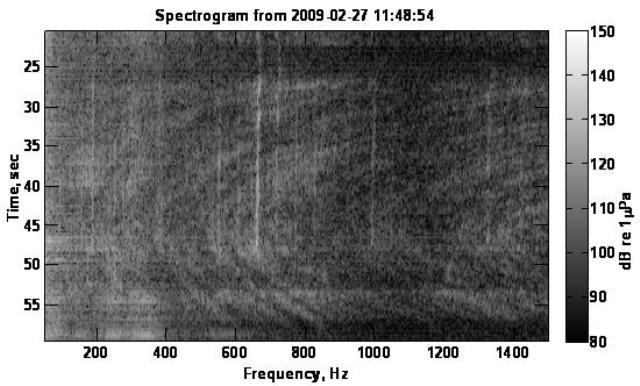
Sensors are being developed and tested to listen and record underwater sound. These sensors could be used in a number of different applications including noise monitoring, boat, fish, and marine mammal detection.
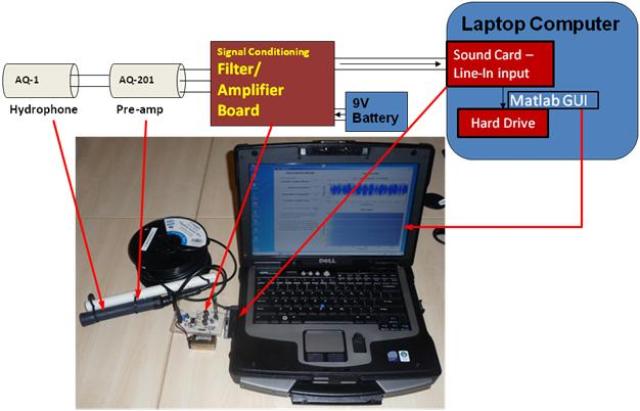
A laptop-based system is easily portable and is used frequently to listen to boats on the Willamette River. The system includes:
• Hydrophone and preamp with 1Hz-10kHz bandwidth.
• Signal conditioning board powered by a 9V battery.
• Laptop with 16-bit line-in input.


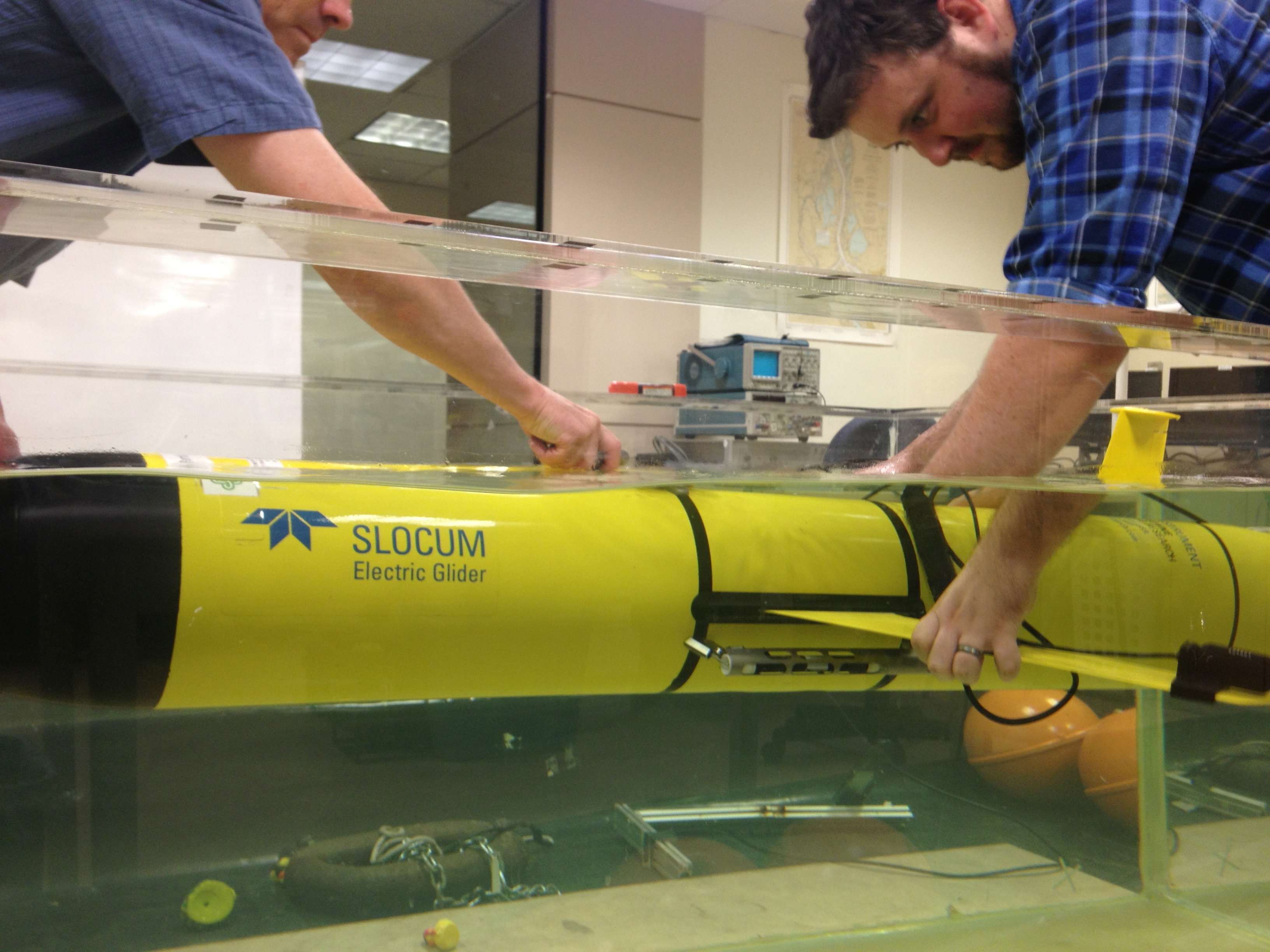
The NEAR-Lab acquired its glider in April 2009, expanding the lab's ability to gather data in more diverse environments. The glider was named Clyde in honor of Clyde Drexler, also known as Clyde, the Glide. The Slocum shallow-water sea glider is capable of carrying various sensors, or payloads, for up to 30 days, diving to depths of up to 200 meters with a 1000 km range. It is better suited to operate in shallow, near-shore environments. However, it is still capable of operating as an off-shore platform, providing a large amount of flexibility.
A sea glider is an autonomous Unmanned Underwater Vehicle (UUV) that does not require any form of motorized propulsion. Instead of the conventional method of using a propeller that is attached to a motor for forward thrust, the sea glider can change its buoyancy (weight in water) between being slightly positive (or light) to slightly negative (or heavy) in order to glide through the water. Using the same principles that allow an airplane glider to fly - weight, lift and thrust - in both vertical directions, the sea glider has small wings that provide lift in the opposite direction of its buoyancy in order to propel itself forward. This means that the sea glider must move through the water column in a series of dives and accents, called yos. Viewed from the side this gives the sea glider's path a saw-toothed profile.
Except for a small servo used to actuate the rudder and an electric motor that changes the buoyancy of the UUV, there are no moving parts in the Slocum Sea Glider. The buoyancy motor only needs to be actuated at the top or bottom of each yo. Therefore power consumption is very minimal and the Solcum Sea Glider has very long range and endurance in comparison to UUVs that use motorized propulsion.
Currently Clyde is equipped with an SBE Conductivity, Temperature, and Depth (CTD) sensor, two HTI-92WB pre-amplified hydrophones, and a JASCO AMAR acquisition board.